
 的网站首页
的网站首页
似乎是整夜之间,无东说念主驾驶一霎火了。
7月,百度旗下的「萝卜快跑」的无东说念主驾驶出租车在武汉大面积铺开,险些每天齐在制造新闻。
据报说念,萝卜快跑单日单车峰值超20单,已与出租车平均日单量相近,且乘客体验更好、更甘心。从保障数据看,萝卜快跑的脱险率仅为东说念主类的1/14,目下安全行驶进取1亿公里,莫得出现一例关键伤一火事故。
而大洋此岸,马斯克也文牍将在8月发布特斯拉首款无东说念主驾驶出租车Robotaxi(后推迟至10月),他示意车主可以在舒应时刻将Robotaxi参加出租业务,两年内即可收回购车费本。
无独到偶,7月23日谷歌也文牍将对Waymo追加新一轮50亿好意思元的巨额投资,以“保握Waymo世界起先自动驾驶公司的地位”,要知说念当年微软投资OpenAI也只花了10亿好意思元,50亿好意思元还是接近waymo历次融资的总数。
事实上,今天无东说念主驾驶的爆发绝非偶然。站在业内视角,昔时3年亦然自动驾驶技巧发展最快的3年,险些可以说是“一日沉”。
从目下中好意思两国的进展来看,若是抛开立法圭臬和时刻的羁绊,无东说念主驾驶很可能将在未来1-2年内参加全面商用,在5-10年达到端到端的“完全体”,达成肖似科幻电影中的无东说念主驾驶形态。
从这个角度来说,虽然当今批驳无东说念主驾驶的“iPhone 4时刻”巧合还为先锋早,但无东说念主驾驶的时期奇点简直还是到来。
与此同期,这亦然一场与时刻的竞走:中好意思当作全球自动驾驶企业数目最多的两个国度,谁能率先跑通并缔造起联系产业链,谁也就有了界说赛说念、向其他国度输出技巧产物的才略。
站在中好意思科技竞争的大配景下,这对任何一方来说,齐是一场“输不起的斗争”。
在本文中,咱们将从自动驾驶的发展史脱手,尝试来推测下行业未来的发展趋势。起先先共享几个初步论断:
1.从高精舆图、激光雷达到BEV:自动驾驶的进化一切旅途齐是为了“让车的行动更像东说念主”。
2.昔时3年亦然自动驾驶技巧发展最快的3年,国表里无数玩家齐已达成了不同程度的端到端,瞻望未来,最终达到举座端到端的终极形态也只是时刻问题。
3.非论是纯视觉如故激光雷达路子,毫米波雷达齐是弥补两者技巧短板最佳的技能,随着毫米波雷达从3D到4D再到成像毫米波雷达,约束赞助的精度也让这个赛说念领有了出身高价值公司的契机。
4. 自动驾驶的落地和生意化可能只是个开动,未来更多的赛说念和产物(比如不同场景的机器东说念主)在积攒饱和的数据之后,齐可能复现肖似的故事。
5. 纵不雅历史,每一次技巧路子的迭代,齐有一批创业公司崛起的契机,确信此次也不例外。
为什么说昔时3年,是自动驾驶发展最快的3年?
自动驾驶公认的发祥是2004年,那时的好意思国正深陷阿富汗和伊拉克的干戈泥潭,急需一批军用无东说念主载具来减少好意思军的伤一火,但研发进程经久不睬想。
于是,时任好意思国国防部高档磋议贪图局(DARPA)局长托尼·特瑟突发奇想,搞出了一场挑战赛,文牍非论谁只须能用无东说念主驾驶的方式,在10小时内从洛杉矶到达拉斯维加斯,就可以赢得100万好意思元奖金。
这推行上是一场好意思军针对民间的大型招标,独揽方原本以为没什么东说念主会参加,扫尾没猜度有100多个团队报名,不外缺憾的是,最终莫得一个东说念主能拿走这笔奖金——因为最远的一辆参赛车也只行驶了12公里,约等于统共这个词的赛程的5%。
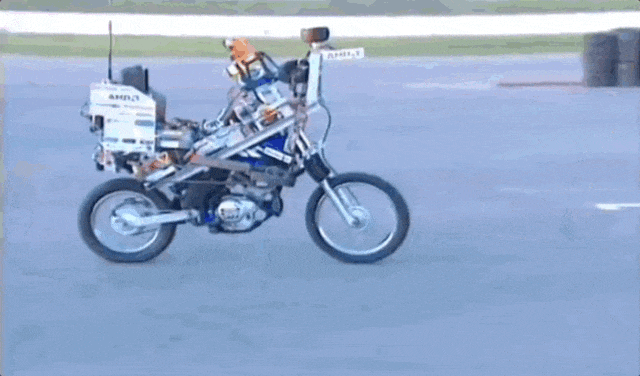
(图:那时参赛的除了汽车,还有自动驾驶摩托车……)
但DARPA并未甩掉,又在2005-2007年邻接举办了3届自动驾驶挑战赛,诱骗了无数大学和企业的磋议团队参加其中,这也让谷歌创始东说念主之一的拉里佩奇看到了自动驾驶的后劲。
2009年,在佩奇的激动下,谷歌自动驾驶技俩「Chauffeur」厚爱启动,招募的两位中枢工程师(安东尼·莱万多夫斯基与塞巴斯蒂安·特龙)齐曾是DARPA的参赛选手,这两个东说念主其后也为了谷歌自动驾驶部门的创始者。
到2014年,谷歌发布了全球第一辆莫得主见盘和油门踏板的全自动驾驶汽车Firefly,不仅漂泊了汽车界,也让全世界初度融会到了自动驾驶达成的可能性。

(图:Google自研的第一代无东说念主驾驶汽车Firefly)
紧随着,大笔风险投资开动涌入无东说念主驾驶赛说念:从Uber、英伟达、亚马逊,到百度、滴滴、华为,再到飞驰、良马、通用、本田,包括国内的造车新势力们,纷繁开动了对自动的驾驶研发的参加,今天咱们耳濡目染自动驾驶公司也大多创立于那时。
时刻很快来到2年之后,对自动驾驶的行业来说,2016是个极其遑急的年份——因为这一年,特斯拉厚爱加入了战局。
不夸张的说,以2016年为分界线,统共这个词自动驾驶的下半场,即是一部特斯拉从一个行业追逐者,逐渐变成引颈者的逆袭史,是以个东说念主认为,怎样去渲染这个时点齐不外分。
在2016年之前,险些统共自动驾驶公司齐选用了谷歌的技巧决策:
1)定位:以高精度舆图的辅助定位;
2)感知:用激光雷达+视觉录像头为车辆提供感知信息;
3)规控:基于rule based算法作念决策和欺压。
不难发现,谷歌决策的底层逻辑是「叠甲」,所谓“有总比莫得好、多总比少好”。
这一片认为,以目下的技巧水平,莫得一个单一传感器能够完成自动驾驶所需的一起功能,或者说隐私统共corner case,因此需要愚弄统共传感器来空洞进行自动驾驶决策,给不同的传感器分拨不同的权重;而这其中,激光雷达的权重又是最高的,是以这一片的贬责决策也被称为「激光雷达决策」;推行上,这是一条硬件为主的技巧路子。
而当作AI起家的科技公司,特斯拉则更敬重软件的网站首页,比如马斯克就觉恰那时的激光雷达太贵了,要8万好意思元一个,是以他把更多的元气心灵放在研发坚定的视觉算法及专用AI芯片,试图借助录像头对邻近物体缔造模子,并把数据添加至神经汇集进行算计,逐渐发展出了「纯视觉决策」这条偏软件的技巧旅途。
用马斯克我方的话说,“东说念主和动物齐长眼睛,而不是雷达“,红运的齿轮也由此开动动弹。
在那时来看,两条技巧路子各有千秋:激光雷达虽然硬件资本高,但天生精度高、且具备深度信息(直到今天,许多工程师依然对激光雷达情有独钟);而录像头虽然低廉,但分辨才略有限,只可在二维世界里通过物体一个面的信息发奋作念对照,通过算计与飘摇得来的谍报总归不如一手信息来得准确和直不雅。
这也导致特斯拉一度自建了上千东说念主的标注团队,是以那时许多东说念主就质疑马斯克,说你硬件虽然低廉了,但综联合本算下来还不如激光雷达。
其实从这里也能看出,那时统共这个词自动驾驶的AI程度险些等于莫得(除了lidar略微有一些ai算法),属于典型的“有些许东说念主工,就有些许智能”,若是AI的发展就此停步,那么特斯拉的纯视觉决策粗略率也会遭逢瓶颈。
不外最终,调停特斯拉的如故谷歌:
2019年,谷歌发表了那篇闻名的Transformer论文(亦然其后大模子的基础)。
虽然Transformer是一种基于注观点机制的神经汇集模子,但特斯拉的工程师很快发现,Transformer不仅可以处理谈话信息,也可以用于处理图像信息。
简言之,Transformer能够把特斯拉8个录像头网罗到的信息,交融到团结套定位坐标体系中,很是于让汽车赢得了“天主视角”(即BEV,“俯视图”),能够看到周围环境的3D信息。
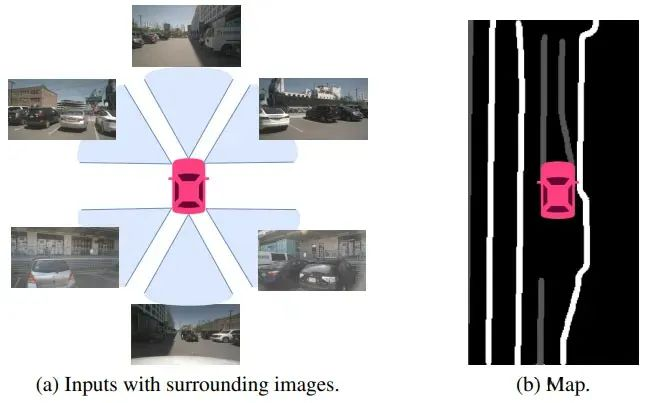
(图:BEV技巧让特斯拉有了“天主视角”)
2021年的AI day上,特斯拉发布并奏效带火了BEV,从2022年下半年开动,国内玩家也纷繁文牍跟进,并逐渐开动达成BEV上车。
(是以说,虽然许多技巧并非特斯拉原创,但它把前沿探索的先进表面工程化并推行落地应用的才略,十足是天地级别。)
与此同期,特斯拉也开动尝试将标注进程尽可能自动化,来贬责资本太高的问题。
它的旨趣有点像玩猜字谜:起先,车载录像头在看到某个物体后(比如一棵树),会把信息上传到云表的大模子,然后由大模子来“猜”这个物体是什么?若是预计的扫尾与8个传感器的呈现一致,那么这棵树就将被自动标注。
如斯一来,特斯拉就解脱了东说念主力的戒指,只须车辆能约束发还路面信息,它就能够无尽量地考研我方的算法。
到此为止,特斯拉的进展还是饱和惊艳,但只是一年之后,马斯克又在 AI day上放了两个大招,第一是引入了时空序列,鬼父快播第二是引入了占用汇集。
肤浅来说,前者让汽车领有了关于时刻的顾虑才略,后者则达成了肖似「伪激光雷达」的成果,让汽车在不识别该物体是什么的情况下算计空间位置并判断是否需要进行避障,贬责了之前“撞上白色大货车”的问题。
至此,岂论旅途单从成果而言,视觉决策还是达到了与雷达决策基本一样的成果。BEV+Transformer奏效达成了自动驾驶感知技巧的旅途经管,也变成了今天视觉感知算法的基础框架。
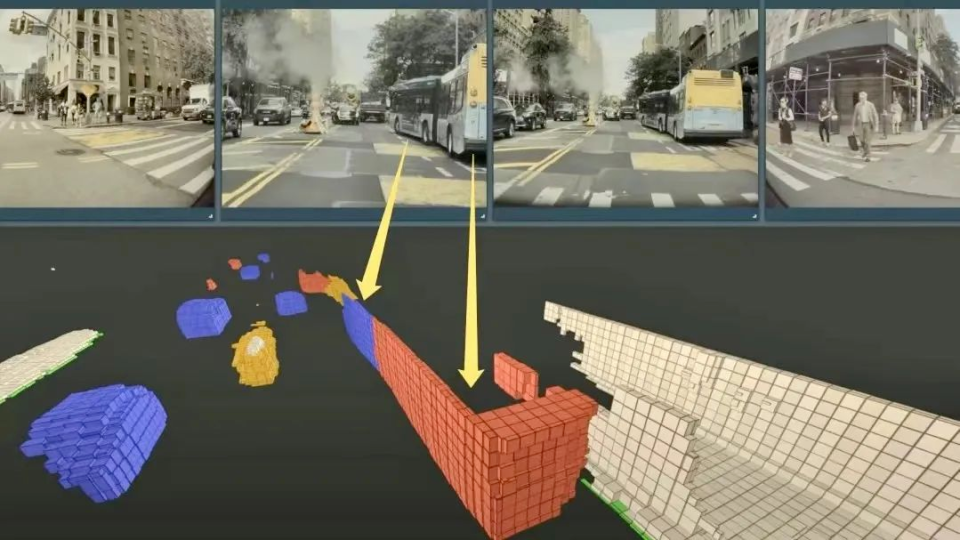
(图:占用汇集达成了肖似「伪激光雷达」的成果)
是以大趋势上,自动驾驶的进化旅途其实是相等清亮的:一切贪图齐是为了让车的行动更像东说念主,让AI可以通过前边发生过什么,预测未来将会发生什么。
从这个角度来看,昔时3年其实亦然自动驾驶技巧发展最快的3年,而AI也在自动驾驶里逐渐展现出坚定的升级迭代才略;但那时的世俗东说念主大多对此了解不深,以为自动驾驶没什么进展。
简直让大众融会到AI对自动驾驶行业产生创新性影响的,如故2023年发生的几件事:
·马斯克初度在酬酢平台上提到“v12 is reserved for when FSD is end-to-end AI”让端到端出当今大众视线中(16年英伟达就提议过但影响力不大),无数东说念主开动期待v12的发布;
·CVPR近十年来初度将best paper颁发给一个中国团队、褒奖其在达成端到端自动驾驶上作念出的孝敬;
·马斯克坐着一辆搭载了v12测试版的model S作念了一次45分钟直播、全程仅插手一次,成果可以说相等可以。
不外也需要明确的是,目下尚无任何径直左证评释特斯拉展示的v12达成了完全的端到端,只是其展示的成果如实相等惊艳,智能化程度基本可以与东说念主类老司机比好意思。
事实上,若是将自动驾驶系统按传统的会通分为感知、有贪图和欺压,目下各大主机厂用于秀肌肉的主要如故部分AI+基础端矜重管的模块化端到端。
而由于每个模块间需要东说念主为界说接口,在这个进程中会亏蚀部分信息,是以模块越多,意味着亏蚀的信息也越多,未来怎样把统共模块长入到一个模子之中,各大厂商还需要连接发奋。
抖阴视频
不外,从咱们网罗到的信息来看,按照目下技巧和工程化的发展速率,自动驾驶最终达成举座端到端也只是时刻问题,对此,我个东说念主相对保守的预测仍然需要3-5年支配的积攒。
到那时,车辆就可以根据及时网罗到的路面信息,在「黑盒」气象下完成驾驶决策,径直输出刹车、转向等欺压信号,达成肖似于科幻电影中的无东说念主驾驶终极形态。
(图:自动驾驶的五个发展阶段,贵府源流:险峰长青)
无东说念主驾驶迭代带来的创投契遇
为什么无东说念主驾驶在此时爆发?推行来说,咱们感受到的无东说念主驾驶的“跃进”式发展,只是这一波AI高涨的大配景下、从model-base到learning-base范式转机的具体进展之一,但为什么它能起初起来?
原因相等复杂,这里只是商榷三个我认为的关节要素:
一是数据相对丰富。
人所共知,“出行”是个高频需求,国内无东说念主驾驶行业从2015年前后开动兴起,到今天还是有差未几10年时刻;这期间,主机厂和智驾公司网罗到的数据,岂论质料的锐利,至少在总量上还是饱和丰富,这就为其后达成数据闭环创造了基础条目。
二是功能界说相对清亮明确。
坦荡讲,虽然这一波AI的见识很热,但其实许多产物的发展主见齐是不解确的。
比如说东说念主形机器东说念主,许多公司只是作念出了一个样品,可以在展会上进行演示,但放到推行的工业场景中,这些机器东说念主到底能贬责什么问题、作念到什么程度,上游技巧端其实是不明晰的。
而卑鄙工场端因为不懂AI,通常也不知说念这些机器东说念主能达成什么功能、是否可以和其他技巧进行组合,两边只是是拉平会通,就需要破耗很万古刻。
但无东说念主驾驶却不存在这个问题,车辆独一前进后退转弯加快刹车这几个动作,就可以隐私统共驾驶场景的基础行动,AI只须能作念好这些就饱和了,需求阳春白雪。
是以,从先进的技巧飘摇到好用的产物,有一个明确的功能界说和圭臬分离亦然必不能少的身分。
三是硬件基础相对老到。
非论是激光、录像头、以及毫米波等传感器决策,如故提供信号传递和处理的万般芯片,在经过这10年的充分“内卷”后,基本齐已进入高性价比+空闲供货的阶段。
因此,在数据、硬件、技巧三者螺旋上升的进程中,自动驾驶率先到达了阿谁价钱和体验的均衡点,也就很快变成了新的坐褥力。
是以,若是沿着这个逻辑再上前推一步,自动驾驶很可能也只是个开动,未来更多的赛说念齐有可能复现肖似的故事。
天然,前提是这个规模中要出现一些公司,能够握续以低资本的网罗到巨额数据(肖似于自动驾驶中滴滴、百度、特斯拉这么的企业),而不是只靠一些零星的少许据,这可能是咱们判断某个行业是否出现肖似拐点的一个基础。
换个角度来说,借助这波大模子的崛起,许多可以被AI自动化、但尚未有大公司跑出来的细分规模(比如低空经济、工业制造联系),未来可能齐存在着系统性的投资契机,解除着百亿致使千亿级别的科技上市公司,相似也值得重大投资东说念主和蔼。
自动驾驶还有哪些可以投?刚刚略微发散了一下,当今让咱们把念念维拉转头,如故聊聊自动驾驶自己。纵不雅历史,其实每一次自动驾驶技巧路子的迭代,齐有一批创业公司崛起的契机。
比如谷歌时期的主流决策是激光雷达+录像头+高精舆图,但今天高精度舆图在乘用车上的使用频率越来越低,致使不再被拿起(想想也不外才是两年前的事情)。
因为那时,光一辆舆图采集车的资本就上百万,若是要尽可能保阐述时性,那么每天至少要保证几百辆车同期在路上跑,才能清高宇宙舆图的及时采集与更新,这是任何车企或舆图商齐无法承受的。
扫尾即是产业契机最终落在了激光雷达上头:
起先是硬件厂商的崛起,比如禾赛速腾,再其后出现了文远、小马、Vimo等一批围绕着激光雷达作念算法的公司,紧随着是一批创业者开动基于雷达+阻塞场景,尝试小范围闭环一些L4级别自动驾驶的应用,出现了多样各样的矿山无东说念主车、港区无东说念主车、旅店送餐机器东说念主等等,统共这个词自动驾驶的生态开动逐渐开枝散叶。
但特斯拉用BEV+Transformer再次颠覆了行业,评释即使莫得雷达,相似可以达成对3D空间的判断。这时,激光雷达就变得和当年的高精舆图一样,不再是一个必选项。
天然,今天激光雷达的价钱还是降到了千元级别,何况很可能会连接下落,因此短期内,部分车企依然会罗致多传感器交融的决策。
然而基于降本逻辑,在主机厂们“每一分钱齐要卷到极致”确当下,激光雷达未来一定会逐渐被纯视觉决策取代,统共这个词产业生态样貌也势必会随之更动。
比如,传统的毫米波雷达只可获取平面的信息,下一代可以探伤高度信息的4D毫米波雷达的主见还是出现,咱们看到的一些hints包括但不限于:产物层面跟随着芯片公司的多片级联、SoC决策为高精度、低资本决策铺路;产业需求层面oem对国产自主可控决策的渴慕和尝试;高阶智驾产物对安全性、冗余要求的赞助等等。
总之,在各样需求的协力激动之下,这个垂类中很可能会有一些新玩家跑出来。

再比如,随着录像头网罗到的信息越来越多、质料越来越高,由此又繁衍出了对超算中心、端侧大算力处理芯片的需求,包括下一代端侧芯片,也不单是单纯的堆算力,而是要纠合不同的算法架构,让两者更好地达成适配,这些齐是硬件端带来的新变化。
而在偏软的方朝上,咱们则会和蔼那些低资本+高质料+可握续的数据赢得/坐褥方式。
在端到端的路子下,learning-base的算法使用数据当作燃料驱动还是是事实,比如特斯拉的V12就被透露“已使用了一万块H100,已完成约1000万个视频考研。”
“这些视频来自每天从全球200万台可网罗数据的实车网罗的1600亿帧视频,而其中不到1%的视频是可用的,比如一些奇怪和非常勤劳的十字街头数据。”
当作第一个吃螃蟹的东说念主,马斯克还是向业界交了一份饱和优秀的答卷,那么接下来到底是通过影子模式、仿真引擎、亦或者world model的方式来赢得高质料的数据,似乎就成了业界下一个需要探索共鸣的问题。
不外,我认为这还是无法单纯由某一个神色的公司来决定:尽管技巧路子天然遑急,但产业定位和生意模式,巧合才是当今这个环境下,中国公司必须要作念的前置念念考。
一言以蔽之,随着高阶智驾的落地逐渐升级换代,感知、传输、决策、实践、交互一定齐会出现一些新的产业契机。
比如我最近和一些车圈创始东说念主谈判,发现大众除了各自的主业以外,也齐在和蔼一些跨规模应用的技巧和产物,许多出东说念主预感的、跨行业的先进技巧,临了齐成为了他们的潜在友商和配合伙伴。
这说明,当行业里面竞争还是到达一定程度,只靠限制推广+更正供应链很难赢得饱和的利润空间时,企业就必须要向新技巧寻求新的打破点,内卷的止境最终如故要靠科技发展隆起重围。
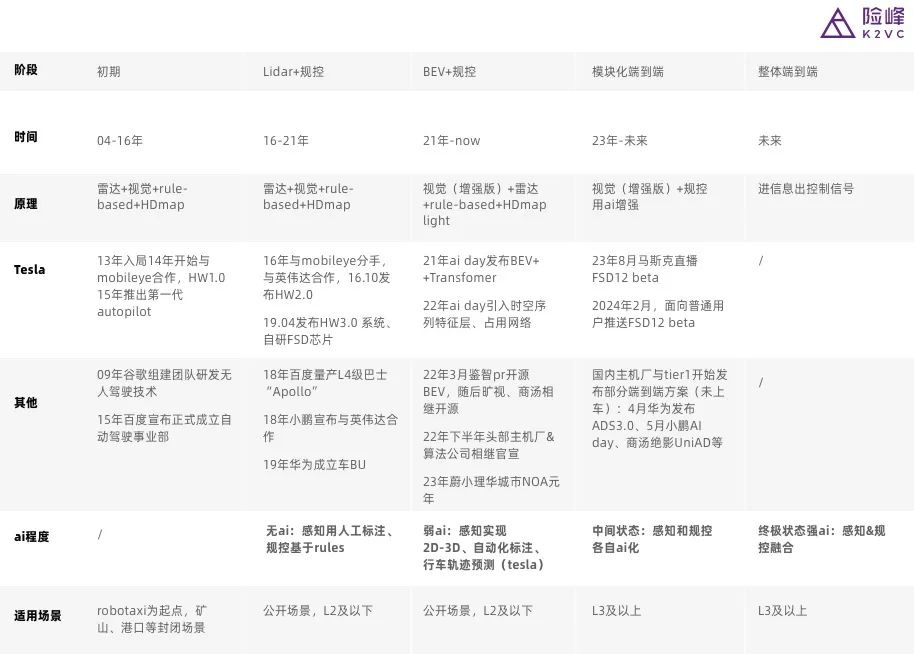
限于篇幅,文末肤浅整理了一个表格,拙见所及,来尝试拆解AI智驾时期的创业契机,但愿能给你带来不一样的念念考角度。

(图:自动驾驶不同阶段带来的产业变化与契机的网站首页,贵府源流:险峰长青)